
Ультразвуковой дальномер

Дальномер, он же датчик расстояния — это устройство для измерения расстояния до некоторого предмета. Данный прибор широко используется в автоматике, в том числе и в роботах. Например, мобильный робот может использовать дальномер для обнаружения препятствий в окружающем пространстве. Летающий дрон использует датчик расстояния для барражирования над землей на заданной высоте.
Мы в RobotClass сделали дальномер УДМ-40, который в отличие от популярного HC-SR04 обладает дополнительными возможностями.
Во-первых, с УДМ-40 можно работать через интерфейсы I2C и UART, а не с помощью манипуляции сигналами Trigger и Echo.
Во-вторых, на датчике есть разъёмы QIIC, так что его можно легко объединять с другими нашими модулями и контроллерами.
На лицевой стороне датчика размещаются два ультразвуковых резонатора, один для отправки сигнала, второй для приёма.

На обратной стороне имеется специализированная микросхема для работы с УЗ резонаторами и микроконтроллер. С двух сторон платы имеются разъёмы QIIC.
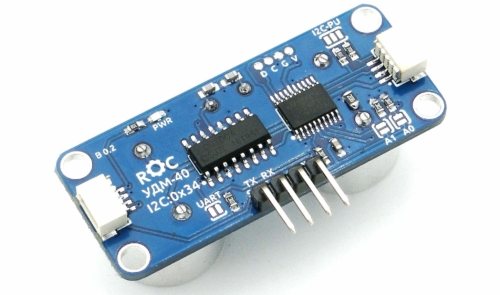
Размеры датчика совпадают с известной моделью HC-SR04, так что его смело использовать в тех же проектах. Однако, следует учитывать, что УДМ-40 работает с напряжением 3.3В, а не с 5В как его прототип, поэтому для подключения к обычно Arduino Uno следует использовать специальный преобразователь логических уровней.
Характеристики
- напряжение питания: 3,3 В;
- эффективный угол: 15 °;
- рабочий угол: 30 °;
- измеряемая дистанция: от 2 до 450 см;
- интерфейс: I2C/UART;
- скорость передачи UART: 115200;
- адрес I2C по-умолчанию: 0x34.
Размеры

Принцип действия
Ультразвуковой дальномер работает по принципу измерения времени прохождения отраженного звука. Другими словами, датчик отправляет звуковой сигнал в заданном направлении, затем ловит отраженное эхо и вычисляет время полета звука от датчика до препятствия и обратно.

Из школьного курса физики мы знаем, что скорость звука в некоторой среде величина постоянная, но зависящая от плотности среды. Зная скорость звука в воздухе и время полета звука до цели, мы можем рассчитать пройденное звуком расстояние по формуле:
s = v*t
где v — скорость звука в м/с, а t — время в секундах. Скорость звука в воздухе, кстати, равна 340.29 м/с.
Чтобы справиться со своей задачей, дальномер имеет две важные конструктивные особенности. Во-первых, чтобы звук хорошо отражался от препятствий, датчик испускает ультразвук с частотой 40 кГц (отсюда и название «ультразвуковой»). Для этого в датчике имеется пьезокерамический излучатель, который способен генерировать звук такой высокой частоты. Во-вторых, излучатель устроен таким образом, что звук распространяется не во все стороны (как это бывает у обычных динамиков), а в узком направлении. На рисунке представлена диаграмма направленности типичного УЗ дальномера.

Как видно на диаграмме, угол обзора самого простого УЗ дальномера составляет примерно 50-60 градусов. Для типичного варианта использования, когда датчик детектирует препятствия перед собой, такой угол обзора вполне пригоден. Ультразвук сможет обнаружить даже ножку стула, тогда как лазерный дальномер, к примеру, может её не заметить.
Если же мы решим сканировать окружающее пространство, вращая дальномер по кругу как радар, УЗ дальномер даст нам очень неточную и шумную картину. Для таких целей лучше использовать как раз лазерный дальномер.
Также следует отметить два серьезных недостатка УЗ дальномера. Первый заключается в том, что поверхности имеющие пористую структуру хорошо поглощают ультразвук, и датчик не может измерить расстояние до них. Например, если мы задумаем измерить расстояние от летающего дрона до поверхности поля с высокой травой, то скорее всего получим очень нечеткие данные. Такие же проблемы нас ждут при измерении дистанции до объекта покрытого текстилем.
Второй недостаток связан со скоростью звуковой волны. Эта скорость недостаточно высока, чтобы сделать процесс измерения более частым. Допустим, перед роботом есть препятствие на удалении 4 метра. Чтобы звуковая волна распространилась туда и обратно, потребуется целых 24 мс!
Список необходимых компонентов
Как уже было указано ранее, организовать передачу данных от датчика УДМ-40 можно двумя различными способами: через интерфейсы I2C и UART. Таким образом, датчик можно подключить практически к любому микроконтроллеру.
Для выполнения экспериментов с вариантом подключения по I2C будем использовать отладочную плату Графит-S3. А при работе по UART воспользуемся обычным USB-UART преобразователем.
При подключении через разъём QIIC понадобится специальный кабель QIIC. Если у контроллера нет разъёма QIIC, то можно использовать соответствующий переходник.
Необходимые компоненты можно добавить в корзину прямо здесь, и затем оформить заказ в нашем интернет-магазине.